


Contrôleur basé sur VESC (36-84V) capable de délivrer 16.8KW dans un format COMPACT !
100% compatible avec SmartDisplay !

Garanties sécurité
Tous nos produits sont testés avant d'être mis sur le marché.

Livraison
Expédition rapide pour les produits en stock
Paiement Sécurisé
Jusqu'à 4 fois sans frais

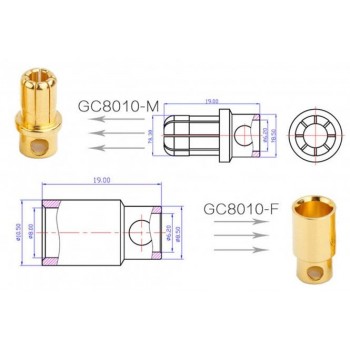

Type de connecteur : Bullet 8mmRésistance : 0.15mOhmRated : 80A DCPeak : 170A DCPoids : ~10gMatériaux : Laiton plaqué ORTaille de câble maximale : 6AWGVENDU en paire mâle + femelle.Compatible avec tous nos moteurs des séries MHS/MHT/XHS/XHT.


Gaine tressée de haute qualité fabriquée en Allemagne Rendez votre véhicule unique et stylé avec ces gaines aux couleurs éclatantes ! Taille : Medium Convient à des câbles de 5 à 14mm de diamètre. Prix vendu au mètre.


Gaine tressée de haute qualité fabriquée en Allemagne Rendez votre véhicule unique et stylé avec ces gaines aux couleurs éclatantes ! Taille : Medium Convient à des câbles de 5 à 14mm de diamètre. Prix vendu au mètre.


Liste des fonctionnalités du SmartDisplay : Il peut verrouiller le véhicule par BlueTooth (avec une balise, le smartphone ou n'importe quel appareil bluetooth). Lorsqu'il est verrouillé, la gâchette d'accélérateur ne fonctionne pas, ainsi,...


Moteurs Haute vitesse Aimants de 70mm RPM 60V : 2604RPM RPM 72V : 3604RPM Câbles de phases de 10mm² Demi-Jantes à chambre à air (6.5") pour pneus 11"/12"/13" Puissance nominale : 6000W Se monte sur Dualtron Thunder, Bronco Xtreme/Vnom, Nami Burn...
8 autres produits dans la même catégorie :


Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...

Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...

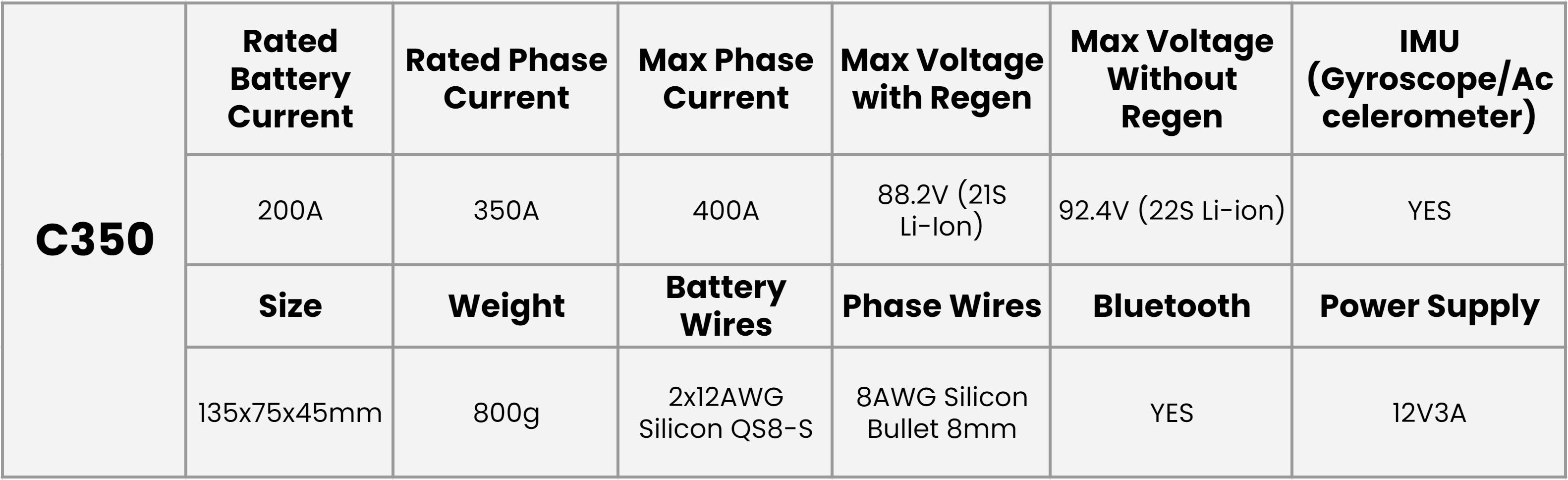
Le contrôleur Rage Mechanics 3SHUL CL350 est un contrôleur polyvalent capable de s'adapter sur tout type d'application de mobilité électrique avec un format compact, une large plage de tension et une puissance maximum de 22.7 kW. Trottinette...

Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...


Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...
Liste des fonctionnalités du SmartDisplay : Il peut verrouiller le véhicule par BlueTooth (avec une balise, le smartphone ou n'importe quel appareil bluetooth). Lorsqu'il est verrouillé, la gâchette d'accélérateur ne fonctionne pas, ainsi,...


Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...


Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...
Contrôleur basé sur VESC (36-84V) capable de délivrer 16.8KW dans un format COMPACT !
100% compatible avec SmartDisplay !
error Votre avis ne peut pas être envoyé