


Contrôleur basé sur VESC réglable de 36V à 126V et capable de délivrer 22.7KW dans un format ultra COMPACT !
Ce contrôleur s'adapte sur tout type d'application électrique tel que les trottinettes électriques, vélos électriques, motos et scooters électriques, Gyropodes, voitures électriques, véhicules radiocommandés, robots et automatisation industrielle, skates et longboards électriques et autres véhicules électrique.
Ce contrôleur est compatible avec le SmartDisplay !

Garanties sécurité
Tous nos produits sont testés avant d'être mis sur le marché.

Livraison
Expédition rapide pour les produits en stock
Paiement Sécurisé
Jusqu'à 4 fois sans frais

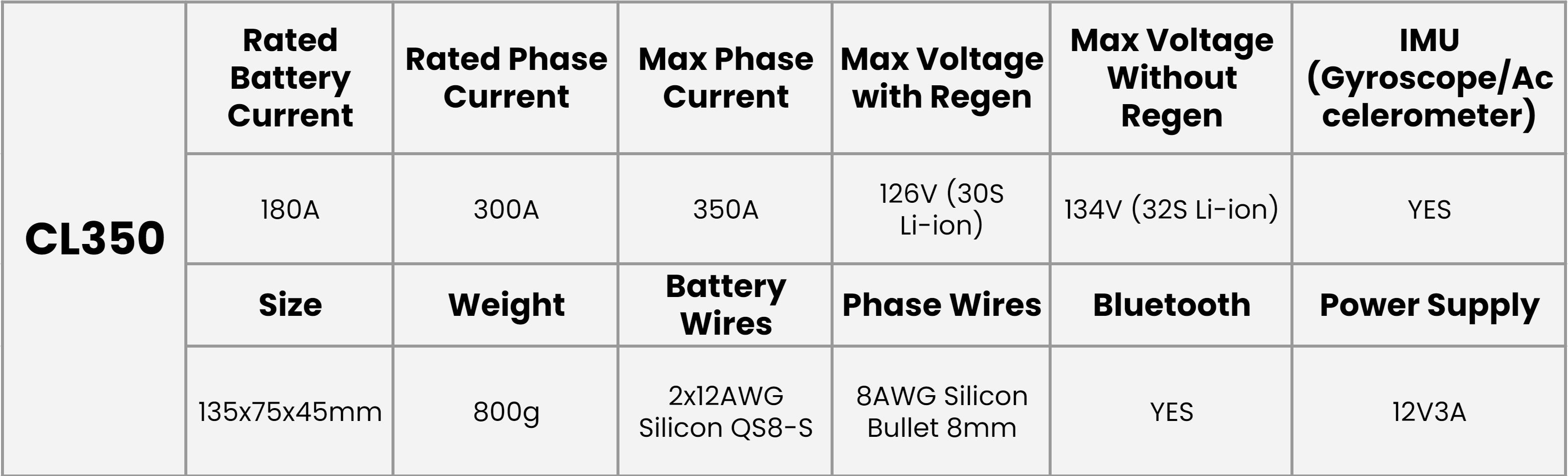
Le contrôleur Rage Mechanics 3SHUL CL350 est un contrôleur polyvalent capable de s'adapter sur tout type d'application de mobilité électrique avec un format compact, une large plage de tension et une puissance maximum de 22.7 kW.
Le contrôleur 3SHUL CL350 permettra d'augmenter drastiquement la puissance de votre machine jusqu'à 23 kW en s'adaptant facilement.
Il peut également remplacer un contrôleur d'origine défaillant ou de mauvaise qualité et conserver les réglages de base de votre machine.
Il s'adapte également avec notre Smart Display proposant plus de 30 fonctionnalités, telles que la navigation GPS, le verrouillage du véhicule à distance, la télémétrie ou encore la gestion de flottes de véhicules.
Le contrôleur 3SHUL CL350 est parfait pour une électrification de vélo électrique, adaptable également avec le Smart Display.
Dans le cadre du développement d’applications industrielles et robotiques, notre contrôleur constitue une solution optimale, garantissant une gestion précise des systèmes motorisés, une régulation efficace de l’énergie et une intégration fluide dans des environnements automatisés complexes.
Intégrant une communication CAN Bus, ce contrôleur permettra un échange de données rapide et fiable entre les différents composants du système.
Dans le cadre du développement d’applications de mobilité électrique, le contrôleur 3SHUL CL350 constitue une solution optimale, alliant précision, efficacité énergétique et adaptabilité. Conçu pour s’intégrer dans une large gamme de véhicules électriques, il assure une gestion avancée de la puissance, une régulation dynamique du couple moteur et une communication fluide via CAN Bus, garantissant une synchronisation optimale entre les différents sous-systèmes embarqués. Sa conception robuste et sa capacité à s’adapter aux exigences spécifiques de chaque application en font un choix stratégique pour l’optimisation des performances et l’amélioration de la durabilité des systèmes de propulsion électrique.
Lorsque le courant limite est atteint, une stratégie de limite software est utilisée pendant que le moteur tourne. Si le courant est beaucoup trop élevé, le moteur est complètement coupé pendant un délai court.
La limite de tours par minute est software.
Monitorage et enregistrement des données en temps réel.


Liste des fonctionnalités du SmartDisplay : Il peut verrouiller le véhicule par BlueTooth (avec une balise, le smartphone ou n'importe quel appareil bluetooth). Lorsqu'il est verrouillé, la gâchette d'accélérateur ne fonctionne pas, ainsi,...


Moteurs Haute vitesse Aimants de 70mm RPM 60V : 2604RPM RPM 72V : 3604RPM Câbles de phases de 10mm² Demi-Jantes à chambre à air (6.5") pour pneus 11"/12"/13" Puissance nominale : 6000W Se monte sur Dualtron Thunder, Bronco Xtreme/Vnom, Nami Burn...
8 autres produits dans la même catégorie :


Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...


Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...

Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...


Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...
Liste des fonctionnalités du SmartDisplay : Il peut verrouiller le véhicule par BlueTooth (avec une balise, le smartphone ou n'importe quel appareil bluetooth). Lorsqu'il est verrouillé, la gâchette d'accélérateur ne fonctionne pas, ainsi,...

Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...


Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...

Features: Contrôleur basé sur le projet open-source VESC®-Project firmware by Benjamin Vedder. (VESC is a registered TM, owned by Benjamin Vedder) Field Weakening et MTPA (Maximum Torque Per Amp) sont supportés. Possibilité de créer des modules...
Contrôleur basé sur VESC réglable de 36V à 126V et capable de délivrer 22.7KW dans un format ultra COMPACT !
Ce contrôleur s'adapte sur tout type d'application électrique tel que les trottinettes électriques, vélos électriques, motos et scooters électriques, Gyropodes, voitures électriques, véhicules radiocommandés, robots et automatisation industrielle, skates et longboards électriques et autres véhicules électrique.
Ce contrôleur est compatible avec le SmartDisplay !
error Votre avis ne peut pas être envoyé